


01

Сверхвысокоточный Электронный Гироскоп MEMS 0,001 ° Акселерометр Для Контроля Угла Наклона
Захват движения в реальном времени и точная оценка ориентации как никогда ранее благодаря калмановской фильтрации и собственному алгоритму объединения датчиков. Обновление данных происходит с частотой до 200 Гц, что обеспечивает точность и надежность каждого движения.
Наш продукт отличается первоклассным оборудованием и инструментами для поворотных столов, дополненными нашими собственными высокоточными алгоритмами калибровки. Интегрируя самостоятельно разработанные процессы калибровки, мы гарантируем повышенную точность измерений для вашего спокойствия.
Разработанная для работы в сложных промышленных условиях, наша система обеспечивает непрерывное высокоточное измерение трехосевых углов ориентации с высокой динамикой и компенсацией в реальном времени. Положитесь на ее непоколебимую стабильность и долговечность для долгосрочной работы.
Упрощая ваш путь, мы предлагаем комплексный пакет, включающий хост-компьютеры, руководства пользователя, руководства по разработке и коды, чтобы упростить ваши исследования и разработки в различных областях применения.
Выбирайте данные и конфигурируйте их в соответствии с уникальными требованиями различных сценариев. Наслаждайтесь гибкостью, без труда адаптируя нашу систему под свои конкретные нужды.
Оцените непревзойденную точность в динамичных условиях, поскольку наша система точно выводит текущее положение модуля. Точность измерения статического положения в 0,001°, исключительная стабильность и производительность, превосходящая профессиональные инклинометры, - доверьтесь нашему решению и получите превосходные результаты.
Параметры Акселерометра
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±2g |
| Коэффициент разрешения | ±2g | 0,0000039(г/младший значащий бит) |
| Статический дрейф нуля | Горизонтальное расположение | ±25 мг |
| Температурный дрейф | -40°С ~ +125°С | ±0,1 мг/℃ |
| Полоса пропускания | / | 5~256 Гц |
Параметры гироскопа (ось XY)
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±2000°/с |
| Коэффициент разрешения | ±2000°/с | 0,061(°/с)/(LSB) |
| Среднеквадратичный шум | Полоса пропускания = 100 Гц | 0,028~0,07(°/с)-СКЗ |
| Статический дрейф нуля | Горизонтальное расположение | ±0,5~1°/с |
| Температурный дрейф | -40°С ~ +85°С | ±0,005~0,015 (°/с)/℃ |
| Полоса пропускания | / | 5~256 Гц |
Параметры гироскопа (ось Z)
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±400°/с |
| Коэффициент разрешения | ±400°/с | 0.000055(°/с)/(LSB) |
| Статический дрейф нуля | Горизонтальное расположение | ±1°/с |
| Температурный дрейф | -40°С ~ +85°С | ±5(°/с)/℃ |
Параметры Угла Продольного И Поперечного Наклона
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | X:±180° |
| Y:±90° | ||
| Точность наклона | / | 0,001° |
| Коэффициент разрешения | Горизонтальное расположение | 0,001° |
| Температурный дрейф | -40°С ~ +85°С | ±0,5~1° |
Параметр Угла Поворота
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | От:±180° |
| Точность направления | 6-осевой алгоритм, статический | 0,1°(Существует динамическая интегральная суммарная ошибка) |
| 【1】 | ||
| Коэффициент разрешения | Расположите горизонтально | 0,0055° |
Примечание
【1】 В некоторых условиях вибрации могут возникать кумулятивные погрешности. Конкретные погрешности не могут быть оценены и подлежат фактическому тестированию.
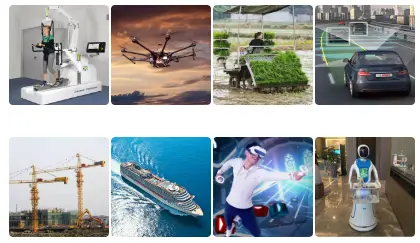
Применение
- Виртуальная реальность/дополненная реальность, дисплеи, устанавливаемые на голову
- Крупномасштабное сельскохозяйственное автоматическое земледелие
- Мониторинг безопасности высотных операций
- Беспилотники, пилотируемые самолеты
- Промышленный мониторинг ориентации
- Отслеживание/захват движений человека
- Роботы, автономные управляемые транспортные средства
- Навигация для пешеходов
- Беспилотное вождение/помощь при вождении
- Военные, интеллектуальное оружие и оборудование